


{kind=link}
{kind=link}
- Pazartesi :Kapalı
- Salı :Kapalı
- Çarşamba :Kapalı
- Perşembe :Kapalı
- Cuma :Kapalı
- Cumartesi :Kapalı
- Sunday :Kapalı
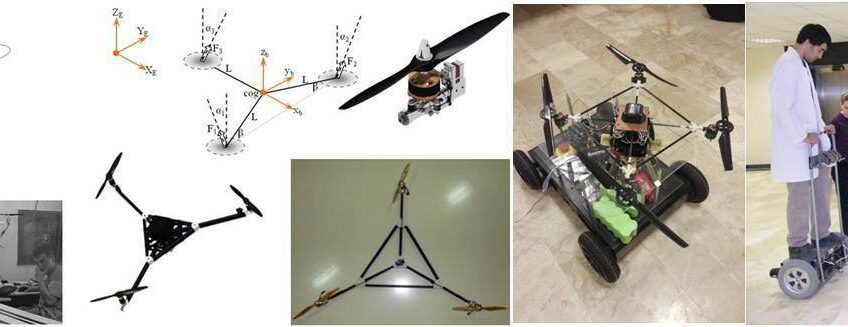
Research Topics on Flying Robotics
Effects of Active Landing Gears on the Attitude Dynamics of a Quadrotor
M.Sc. Thesis completed at October, 2015. Chassis, drivers, motors, and the propellers are from TURKUAV Platform by Robonik Mechatronic Technologies (www.robonik.com.tr). Naze 32 and Multiwii are used. Luxfloat control architecture is optimized on the test bench and Simulink models. It is shown that active landing gears (or similar manipulators on the quadrotor) can be utilized to reject the disturbances. In addition, they can be used to improve the agility of the system. Switching from disturbance rejection mode to improved agility mode will be managed by a higher level control system.

Research Topics on Flying Robotics
Effects of Active Landing Gears on the Attitude Dynamics of a Quadrotor
M.Sc. Thesis completed at October, 2015. Chassis, drivers, motors, and the propellers are from TURKUAV Platform by Robonik Mechatronic Technologies (www.robonik.com.tr). Naze 32 and Multiwii are used. Luxfloat control architecture is optimized on the test bench and Simulink models. It is shown that active landing gears (or similar manipulators on the quadrotor) can be utilized to reject the disturbances. In addition, they can be used to improve the agility of the system. Switching from disturbance rejection mode to improved agility mode will be managed by a higher level control system.